Camunda external task Robot Framework RCC client
================================================
**Technology preview.**
`carrot-rcc` is an opinionated [Camunda external task](https://docs.camunda.org/manual/latest/user-guide/process-engine/external-tasks/) client for executing [Robot Framework](https://robotframework.org/rpa/) [RPA framework](https://rpaframework.org/) automation tasks. It is based on Robocorp [RCC toolchain](https://robocorp.com/docs/rcc/overview) and [Camunda external task client for Node JS](https://github.com/camunda/camunda-external-task-client-js).
`carrot-rcc` executes automation tasks built and wrapped into robot.zip packages as instructed by [Robocorp documentation](https://robocorp.com/docs/). Single `carrot-rcc` service can subscribe multiple topics and execute tasks from same or different robot-packages concurrently, although only locally on the same computer. `carrot-rcc` should work fine on Windows, Linux and on MacOS.
```bash
usage: carrot-rcc [<robots>...]
[--base-url] [--authorization]
[--worker-id] [--max-tasks] [--poll-interval]
[--rcc-executable] [--rcc-encoding] [--rcc-telemetry]
[--rcc-controller] [--rcc-fixed-spaces]
[--vault-addr] [--vault-token]
[--healthz-host] [--healthz-port]
[--log-level]
[-h] [--help]
<robots> could also be passed as a comma separated env RCC_ROBOTS
options:
--base-url[=<url>] [env: CAMUNDA_API_BASE_URL] [default: http://localhost:8080/engine-rest]
--authorization[=<header>] [env: CAMUNDA_API_AUTHORIZATION] [example: Basic ZGVtbzpkZW1v]
--worker-id[=<string>] [env: CLIENT_WORKER_ID] [default: carrot-rcc]
--max-tasks[=<cpus>] [env: CLIENT_MAX_TASKS] [default: [cpu count]]
--poll-interval[=<milliseconds>] [env: CLIENT_POLL_INTERVAL] [default: 60000]
--log-level[=<debug|info|warn|error>] [env: CLIENT_LOG_LEVEL] [default: info]
--rcc-executable[=<path>] [env: RCC_EXECUTABLE] (or RCC_EXE) [default: rcc]
--rcc-controller[=<controller>] [env: RCC_CONTROLLER] [default: carrot]
--rcc-encoding[=<encoding>] [env: RCC_ENCODING] [default: utf-8]
--rcc-telemetry [env: RCC_TELEMETRY]
--rcc-fixed-spaces [env: RCC_FIXED_SPACES]
--vault-addr[=<addr>] [env: VAULT_ADDR] [default: http://127.0.0.1:8200]
--vault-token[=<token>] [env: VAULT_TOKEN] [default: token]
--healthz-host[=<host>] [env: HEALTHZ_HOST] [default: localhost]
--healthz-port[=<port>] [env: HEALTHZ_PORT] (default: disabled)
-h, --help
examples:
$ carrot-rcc robot1.zip
$ carrot-rcc robot1.zip robot2.zip --log-level=debug
$ RCC_ROBOTS="robot1.zip,robot2.zip" LOG_LEVEL="debug" carrot-rcc
$ CAMUNDA_API_AUTHORIZATION="Bearer MY_TOKEN" carrot-rcc robot1.zip
When --rcc-fixed-spaces is set, concurrent tasks for the same topic may share
RCC space, possibly resulting in faster startup.
```
Design
======
When `carrot-rcc` is started, it examines every given robot-package and examines available task names from their `robot.yaml`. Currently, `carrot-rcc` can only find packages preloaded onto local filesystem.
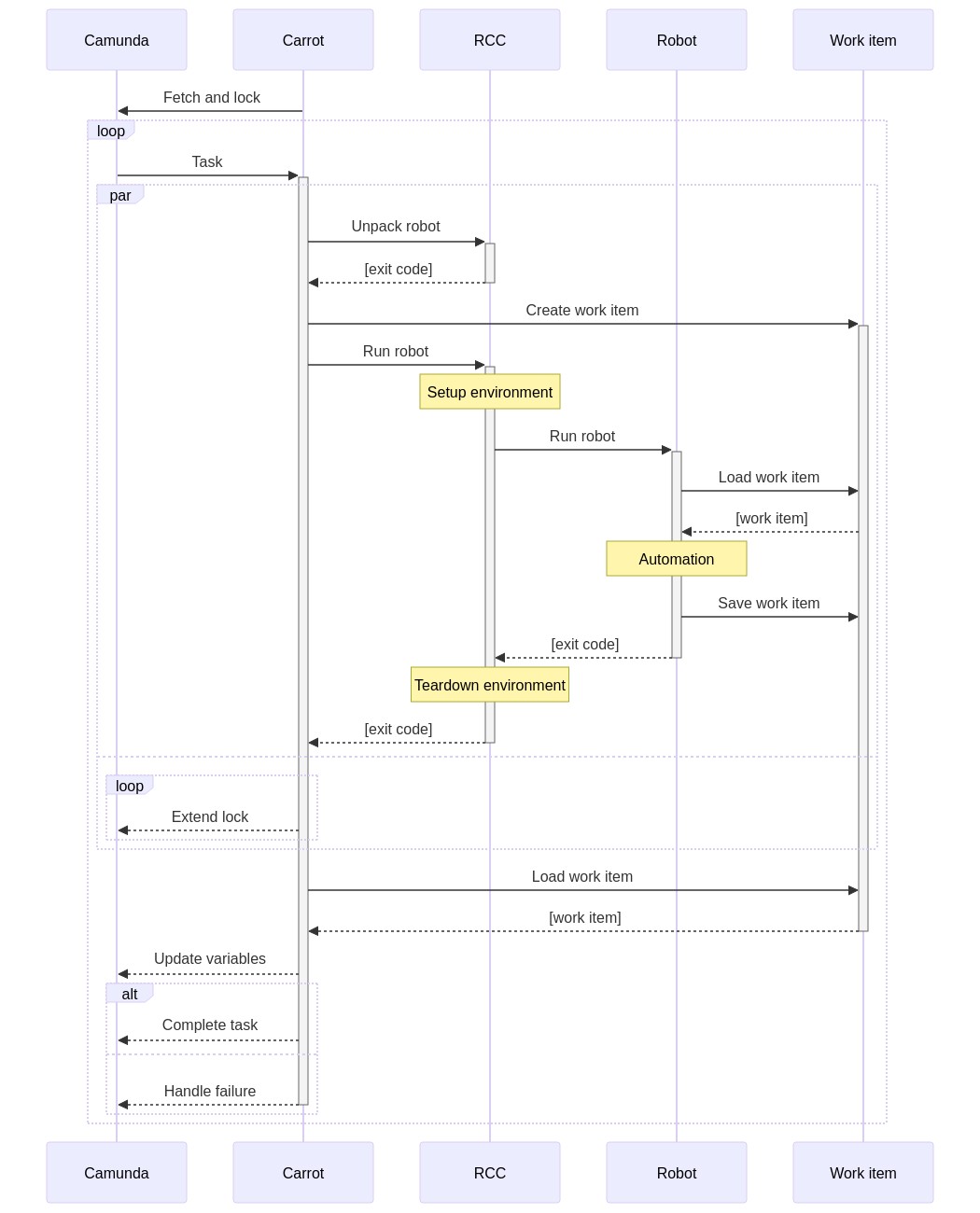
Then `carrot-rcc` subscribes every found task name as they were Camunda external task topics, and starts listening for new tasks for its topics to become available at Camunda.
[](https://mermaid-js.github.io/mermaid-live-editor/edit##eyJjb2RlIjoic2VxdWVuY2VEaWFncmFtXG4gICAgcGFydGljaXBhbnQgQ2FtdW5kYVxuICAgIHBhcnRpY2lwYW50IENhcnJvdFxuICAgIHBhcnRpY2lwYW50IFJDQ1xuICAgIHBhcnRpY2lwYW50IFJvYm90XG4gICAgUGFydGljaXBhbnQgV29yayBpdGVtXG5cbiAgICBDYXJyb3QtPj5DYW11bmRhOiBGZXRjaCBhbmQgbG9ja1xuICAgIGxvb3BcbiAgICBDYW11bmRhLT4-K0NhcnJvdDogVGFza1xuICAgIHBhclxuICAgIENhcnJvdC0-PitSQ0M6IFVucGFjayByb2JvdFxuICAgIFJDQy0tPj4tQ2Fycm90OiBbZXhpdCBjb2RlXVxuICAgIENhcnJvdC0-PitXb3JrIGl0ZW06IENyZWF0ZSB3b3JrIGl0ZW1cbiAgICBDYXJyb3QtPj4rUkNDOiBSdW4gcm9ib3RcbiAgICBOb3RlIG92ZXIgUkNDOiBTZXR1cCBlbnZpcm9ubWVudFxuICAgIFJDQy0-PitSb2JvdDogUnVuIHJvYm90XG4gICAgUm9ib3QtPj5Xb3JrIGl0ZW06IExvYWQgd29yayBpdGVtXG4gICAgV29yayBpdGVtLS0-PlJvYm90OiBbd29yayBpdGVtXVxuICAgIE5vdGUgb3ZlciBSb2JvdDogQXV0b21hdGlvXG4gICAgUm9ib3QtPj5Xb3JrIGl0ZW06IFNhdmUgd29yayBpdGVtXG4gICAgUm9ib3QtLT4-LVJDQzogW2V4aXQgY29kZV1cbiAgICBOb3RlIG92ZXIgUkNDOiBUZWFyZG93biBlbnZpcm9ubWVudFxuICAgIFJDQy0tPj4tQ2Fycm90OiBbZXhpdCBjb2RlXVxuICAgIGFuZFxuICAgIGxvb3BcbiAgICBDYXJyb3QtLT4-Q2FtdW5kYTogRXh0ZW5kIGxvY2tcbiAgICBlbmRcbiAgICBlbmRcbiAgICBDYXJyb3QtPj5Xb3JrIGl0ZW06IExvYWQgd29yayBpdGVtXG4gICAgV29yayBpdGVtLS0-Pi1DYXJyb3Q6IFt3b3JrIGl0ZW1dXG4gICAgQ2Fycm90LS0-PkNhbXVuZGE6IFVwZGF0ZSB2YXJpYWJsZXNcbiAgICBhbHRcbiAgICBDYXJyb3QtLT4-Q2FtdW5kYTogQ29tcGxldGUgdGFza1xuICAgIGVsc2VcbiAgICBDYXJyb3QtLT4-LUNhbXVuZGE6IEhhbmRsZSBmYWlsdXJlXG4gICAgZW5kXG4gICAgZW5kXG4iLCJtZXJtYWlkIjoie1xuICBcInRoZW1lXCI6IFwiZGVmYXVsdFwiXG59IiwidXBkYXRlRWRpdG9yIjpmYWxzZSwiYXV0b1N5bmMiOnRydWUsInVwZGF0ZURpYWdyYW0iOmZhbHNlfQ)
On a new task, `carrot-rcc` remembers which topic was mapped to which task on which robot-package, and unpacks the correct robot-package into a new temporary directory. Then it creates another temporary directory with all external task variables and files as a local [robot work item](https://robocorp.com/docs/libraries/rpa-framework/rpa-robocorp-workitems).
Similarly to work item, for convenience, all `carrot-rcc` process environment variables are made available as `env` secret to keep their use out of Robot Framework logs when used with [RPA framework's Secrets -library](https://robocorp.com/docs/libraries/rpa-framework/rpa-robocorp-vault).
Next [RCC](https://robocorp.com/docs/rcc/overview) is called to resolve robot's dependencies and execute the robot. Robot package may declare any available Conda or Pip package as its dependency. For example, this makes it possible to have [fully functional browser automation stack as a task dependency](https://github.com/datakurre/carrot-rcc/blob/main/xkcd-bot/conda.yaml) independently what the local machine actually has available. RCC caches the dependency environments on the machine to enable their fast re-use.
Finally, `carrot-rcc` saves all the changed and added variables from the saved work item back to Camunda. In addition, it also saves full [Robot Framework execution logs](https://robotframework.org/robotframework/latest/RobotFrameworkUserGuide.html#log-file). All these are saved back into the task execution context, to leave their further use for the BPMN designer. At the end `carrot-rcc` either completes of fails the task at Camunda.
[](https://github.com/datakurre/carrot-rcc/raw/main/example-process.gif)
Usage
=====
`carrot-rcc` requires only [NodeJS](https://nodejs.org/en/) 12 or later and expects [RCC](https://downloads.robocorp.com/rcc/releases/index.html) to be on the environment PATH. RCC location may also be configured manually with ``--rcc-executable`` argument.
It is also possible to bootstrap everything with just using RCC:
1. Create a directory for `carrot-rcc` and download [RCC](https://downloads.robocorp.com/rcc/releases/index.html) into that directory.
2. Download an example [conda.yaml](https://raw.githubusercontent.com/datakurre/carrot-rcc/main/conda.yaml) defining the requirements for `carrot-rcc`.
3. Install `carrot-rcc` into RCC managed environment with
```bash
$ rcc holotree variables conda.yaml > activate.sh
```
or
```bash
$ rcc.exe holotree variables conda.yaml > activate.bat
```
4. And activate the environment:
```bash
$ source activate.sh
```
or
```bash
$ .\activate.bat
```
Done. Now `carrot-rcc` should be ready to be run, for example:
```bash
$ carrot-rcc robot.zip --base-url=http://localhost:8080/engine-rest --log-level=debug
```
or
```bash
$ carrot-rcc.exe robot.zip --base-url=http://192.168.86.156:8080/engine-rest --log-level=debug
```
The project's repository includes [example Camunda processes](https://github.com/datakurre/carrot-rcc/tree/main/camunda/deployment) with example RCC compatible robots ([1](https://github.com/datakurre/carrot-rcc/blob/main/xkcd-bot/robot.zip?raw=true), [2](https://github.com/datakurre/carrot-rcc/blob/main/fleamarket-bot/robot.zip?raw=true)) available.

Retry on failure
================
It is possible to define automatic retries on failure with defining `retries` with a number and `retryTimout` and `retryTimeoutMax` (optional) with milliseconds to wait before the retry. When `retryTimeoutMax` is defined with larger value than `retryTimeout`, timeout will [be gradually increased between retries](https://www.desmos.com/calculator/n8c16ahnrx).
```yaml
tasks:
Camunda Topic:
robotTaskName:
My Robot Task
retries: 10
retryTimeout: 60000
retryTimeoutMax: 3600000
```
Vault support
=============
`carrot-rcc` has some support for [HashiCorp Vault KV secrets engine](https://www.vaultproject.io/docs/secrets/kv). When working `VAULT_ADDR` and `VAULT_TOKEN` set, `carrot_rcc` will resolve secrets defined in each robots' `robot.yaml` each time before a robot execution.
An example `robot.yaml` with secrets:
```yaml
tasks:
Camunda Topic:
robotTaskName:
My Robot Task
vault:
my-secret: /secret-engine-path/data/my-secret-path
condaConfigFile:
conda.yaml
artifactsDir:
output
```
Note: `carrot-rcc` does NOT manage renewal for the given `VAULT_TOKEN`.
Raw data
{
"_id": null,
"home_page": "https://github.com/datakurre/carrot-rcc",
"name": "carrot-rcc",
"maintainer": "",
"docs_url": null,
"requires_python": ">=3.8,<4.0",
"maintainer_email": "",
"keywords": "",
"author": "Asko Soukka",
"author_email": "asko.soukka@iki.fi",
"download_url": "",
"platform": null,
"description": "Camunda external task Robot Framework RCC client\n================================================\n\n**Technology preview.**\n\n`carrot-rcc` is an opinionated [Camunda external task](https://docs.camunda.org/manual/latest/user-guide/process-engine/external-tasks/) client for executing [Robot Framework](https://robotframework.org/rpa/) [RPA framework](https://rpaframework.org/) automation tasks. It is based on Robocorp [RCC toolchain](https://robocorp.com/docs/rcc/overview) and [Camunda external task client for Node JS](https://github.com/camunda/camunda-external-task-client-js).\n\n`carrot-rcc` executes automation tasks built and wrapped into robot.zip packages as instructed by [Robocorp documentation](https://robocorp.com/docs/). Single `carrot-rcc` service can subscribe multiple topics and execute tasks from same or different robot-packages concurrently, although only locally on the same computer. `carrot-rcc` should work fine on Windows, Linux and on MacOS.\n\n```bash\nusage: carrot-rcc [<robots>...]\n [--base-url] [--authorization]\n [--worker-id] [--max-tasks] [--poll-interval]\n [--rcc-executable] [--rcc-encoding] [--rcc-telemetry]\n [--rcc-controller] [--rcc-fixed-spaces]\n [--vault-addr] [--vault-token]\n [--healthz-host] [--healthz-port]\n [--log-level]\n [-h] [--help]\n\n<robots> could also be passed as a comma separated env RCC_ROBOTS\n\noptions:\n\n --base-url[=<url>] [env: CAMUNDA_API_BASE_URL] [default: http://localhost:8080/engine-rest]\n --authorization[=<header>] [env: CAMUNDA_API_AUTHORIZATION] [example: Basic ZGVtbzpkZW1v]\n\n --worker-id[=<string>] [env: CLIENT_WORKER_ID] [default: carrot-rcc]\n --max-tasks[=<cpus>] [env: CLIENT_MAX_TASKS] [default: [cpu count]]\n --poll-interval[=<milliseconds>] [env: CLIENT_POLL_INTERVAL] [default: 60000]\n --log-level[=<debug|info|warn|error>] [env: CLIENT_LOG_LEVEL] [default: info]\n\n --rcc-executable[=<path>] [env: RCC_EXECUTABLE] (or RCC_EXE) [default: rcc]\n --rcc-controller[=<controller>] [env: RCC_CONTROLLER] [default: carrot]\n --rcc-encoding[=<encoding>] [env: RCC_ENCODING] [default: utf-8]\n --rcc-telemetry [env: RCC_TELEMETRY]\n --rcc-fixed-spaces [env: RCC_FIXED_SPACES]\n\n --vault-addr[=<addr>] [env: VAULT_ADDR] [default: http://127.0.0.1:8200]\n --vault-token[=<token>] [env: VAULT_TOKEN] [default: token]\n\n --healthz-host[=<host>] [env: HEALTHZ_HOST] [default: localhost]\n --healthz-port[=<port>] [env: HEALTHZ_PORT] (default: disabled)\n\n -h, --help\n\nexamples:\n\n $ carrot-rcc robot1.zip\n\n $ carrot-rcc robot1.zip robot2.zip --log-level=debug\n\n $ RCC_ROBOTS=\"robot1.zip,robot2.zip\" LOG_LEVEL=\"debug\" carrot-rcc\n\n $ CAMUNDA_API_AUTHORIZATION=\"Bearer MY_TOKEN\" carrot-rcc robot1.zip\n\nWhen --rcc-fixed-spaces is set, concurrent tasks for the same topic may share\nRCC space, possibly resulting in faster startup.\n```\n\nDesign\n======\n\nWhen `carrot-rcc` is started, it examines every given robot-package and examines available task names from their `robot.yaml`. Currently, `carrot-rcc` can only find packages preloaded onto local filesystem.\n\nThen `carrot-rcc` subscribes every found task name as they were Camunda external task topics, and starts listening for new tasks for its topics to become available at Camunda.\n\n[](https://mermaid-js.github.io/mermaid-live-editor/edit##eyJjb2RlIjoic2VxdWVuY2VEaWFncmFtXG4gICAgcGFydGljaXBhbnQgQ2FtdW5kYVxuICAgIHBhcnRpY2lwYW50IENhcnJvdFxuICAgIHBhcnRpY2lwYW50IFJDQ1xuICAgIHBhcnRpY2lwYW50IFJvYm90XG4gICAgUGFydGljaXBhbnQgV29yayBpdGVtXG5cbiAgICBDYXJyb3QtPj5DYW11bmRhOiBGZXRjaCBhbmQgbG9ja1xuICAgIGxvb3BcbiAgICBDYW11bmRhLT4-K0NhcnJvdDogVGFza1xuICAgIHBhclxuICAgIENhcnJvdC0-PitSQ0M6IFVucGFjayByb2JvdFxuICAgIFJDQy0tPj4tQ2Fycm90OiBbZXhpdCBjb2RlXVxuICAgIENhcnJvdC0-PitXb3JrIGl0ZW06IENyZWF0ZSB3b3JrIGl0ZW1cbiAgICBDYXJyb3QtPj4rUkNDOiBSdW4gcm9ib3RcbiAgICBOb3RlIG92ZXIgUkNDOiBTZXR1cCBlbnZpcm9ubWVudFxuICAgIFJDQy0-PitSb2JvdDogUnVuIHJvYm90XG4gICAgUm9ib3QtPj5Xb3JrIGl0ZW06IExvYWQgd29yayBpdGVtXG4gICAgV29yayBpdGVtLS0-PlJvYm90OiBbd29yayBpdGVtXVxuICAgIE5vdGUgb3ZlciBSb2JvdDogQXV0b21hdGlvXG4gICAgUm9ib3QtPj5Xb3JrIGl0ZW06IFNhdmUgd29yayBpdGVtXG4gICAgUm9ib3QtLT4-LVJDQzogW2V4aXQgY29kZV1cbiAgICBOb3RlIG92ZXIgUkNDOiBUZWFyZG93biBlbnZpcm9ubWVudFxuICAgIFJDQy0tPj4tQ2Fycm90OiBbZXhpdCBjb2RlXVxuICAgIGFuZFxuICAgIGxvb3BcbiAgICBDYXJyb3QtLT4-Q2FtdW5kYTogRXh0ZW5kIGxvY2tcbiAgICBlbmRcbiAgICBlbmRcbiAgICBDYXJyb3QtPj5Xb3JrIGl0ZW06IExvYWQgd29yayBpdGVtXG4gICAgV29yayBpdGVtLS0-Pi1DYXJyb3Q6IFt3b3JrIGl0ZW1dXG4gICAgQ2Fycm90LS0-PkNhbXVuZGE6IFVwZGF0ZSB2YXJpYWJsZXNcbiAgICBhbHRcbiAgICBDYXJyb3QtLT4-Q2FtdW5kYTogQ29tcGxldGUgdGFza1xuICAgIGVsc2VcbiAgICBDYXJyb3QtLT4-LUNhbXVuZGE6IEhhbmRsZSBmYWlsdXJlXG4gICAgZW5kXG4gICAgZW5kXG4iLCJtZXJtYWlkIjoie1xuICBcInRoZW1lXCI6IFwiZGVmYXVsdFwiXG59IiwidXBkYXRlRWRpdG9yIjpmYWxzZSwiYXV0b1N5bmMiOnRydWUsInVwZGF0ZURpYWdyYW0iOmZhbHNlfQ)\n\nOn a new task, `carrot-rcc` remembers which topic was mapped to which task on which robot-package, and unpacks the correct robot-package into a new temporary directory. Then it creates another temporary directory with all external task variables and files as a local [robot work item](https://robocorp.com/docs/libraries/rpa-framework/rpa-robocorp-workitems).\n\nSimilarly to work item, for convenience, all `carrot-rcc` process environment variables are made available as `env` secret to keep their use out of Robot Framework logs when used with [RPA framework's Secrets -library](https://robocorp.com/docs/libraries/rpa-framework/rpa-robocorp-vault).\n\nNext [RCC](https://robocorp.com/docs/rcc/overview) is called to resolve robot's dependencies and execute the robot. Robot package may declare any available Conda or Pip package as its dependency. For example, this makes it possible to have [fully functional browser automation stack as a task dependency](https://github.com/datakurre/carrot-rcc/blob/main/xkcd-bot/conda.yaml) independently what the local machine actually has available. RCC caches the dependency environments on the machine to enable their fast re-use.\n\nFinally, `carrot-rcc` saves all the changed and added variables from the saved work item back to Camunda. In addition, it also saves full [Robot Framework execution logs](https://robotframework.org/robotframework/latest/RobotFrameworkUserGuide.html#log-file). All these are saved back into the task execution context, to leave their further use for the BPMN designer. At the end `carrot-rcc` either completes of fails the task at Camunda.\n\n[](https://github.com/datakurre/carrot-rcc/raw/main/example-process.gif)\n\n\nUsage\n=====\n\n`carrot-rcc` requires only [NodeJS](https://nodejs.org/en/) 12 or later and expects [RCC](https://downloads.robocorp.com/rcc/releases/index.html) to be on the environment PATH. RCC location may also be configured manually with ``--rcc-executable`` argument.\n\nIt is also possible to bootstrap everything with just using RCC:\n\n1. Create a directory for `carrot-rcc` and download [RCC](https://downloads.robocorp.com/rcc/releases/index.html) into that directory.\n\n2. Download an example [conda.yaml](https://raw.githubusercontent.com/datakurre/carrot-rcc/main/conda.yaml) defining the requirements for `carrot-rcc`.\n\n3. Install `carrot-rcc` into RCC managed environment with\n\n ```bash\n $ rcc holotree variables conda.yaml > activate.sh\n ```\n or\n ```bash\n $ rcc.exe holotree variables conda.yaml > activate.bat\n ```\n\n4. And activate the environment:\n\n ```bash\n $ source activate.sh\n ```\n or\n ```bash\n $ .\\activate.bat\n ```\n\nDone. Now `carrot-rcc` should be ready to be run, for example:\n\n```bash\n$ carrot-rcc robot.zip --base-url=http://localhost:8080/engine-rest --log-level=debug\n```\nor\n```bash\n$ carrot-rcc.exe robot.zip --base-url=http://192.168.86.156:8080/engine-rest --log-level=debug\n```\n\nThe project's repository includes [example Camunda processes](https://github.com/datakurre/carrot-rcc/tree/main/camunda/deployment) with example RCC compatible robots ([1](https://github.com/datakurre/carrot-rcc/blob/main/xkcd-bot/robot.zip?raw=true), [2](https://github.com/datakurre/carrot-rcc/blob/main/fleamarket-bot/robot.zip?raw=true)) available.\n\n\n\n\nRetry on failure\n================\n\nIt is possible to define automatic retries on failure with defining `retries` with a number and `retryTimout` and `retryTimeoutMax` (optional) with milliseconds to wait before the retry. When `retryTimeoutMax` is defined with larger value than `retryTimeout`, timeout will [be gradually increased between retries](https://www.desmos.com/calculator/n8c16ahnrx).\n\n```yaml\ntasks:\n\n Camunda Topic:\n robotTaskName:\n My Robot Task\n retries: 10\n retryTimeout: 60000\n retryTimeoutMax: 3600000\n```\n\n\nVault support\n=============\n\n`carrot-rcc` has some support for [HashiCorp Vault KV secrets engine](https://www.vaultproject.io/docs/secrets/kv). When working `VAULT_ADDR` and `VAULT_TOKEN` set, `carrot_rcc` will resolve secrets defined in each robots' `robot.yaml` each time before a robot execution. \n\nAn example `robot.yaml` with secrets:\n\n```yaml\ntasks:\n\n Camunda Topic:\n robotTaskName:\n My Robot Task\n\nvault:\n my-secret: /secret-engine-path/data/my-secret-path\n\ncondaConfigFile:\n conda.yaml\n\nartifactsDir:\n output\n```\n\nNote: `carrot-rcc` does NOT manage renewal for the given `VAULT_TOKEN`.\n\n",
"bugtrack_url": null,
"license": "Apache-2.0",
"summary": "Camunda external task Robot Framework RCC client",
"version": "0.8.3",
"project_urls": {
"Homepage": "https://github.com/datakurre/carrot-rcc"
},
"split_keywords": [],
"urls": [
{
"comment_text": "",
"digests": {
"blake2b_256": "654fbb883e68dcdeca615e2834f55af2a89662e43d4936840720d6f6545dc1fe",
"md5": "a53118de7bbdc10e9a32c3ce1f29bc54",
"sha256": "d64c7b6a87c465c3e4913d3ebf9d86b07cfce54fee9c631b7c7ca974a04e0865"
},
"downloads": -1,
"filename": "carrot_rcc-0.8.3-py3-none-any.whl",
"has_sig": false,
"md5_digest": "a53118de7bbdc10e9a32c3ce1f29bc54",
"packagetype": "bdist_wheel",
"python_version": "py3",
"requires_python": ">=3.8,<4.0",
"size": 273162,
"upload_time": "2023-10-03T06:33:03",
"upload_time_iso_8601": "2023-10-03T06:33:03.863251Z",
"url": "https://files.pythonhosted.org/packages/65/4f/bb883e68dcdeca615e2834f55af2a89662e43d4936840720d6f6545dc1fe/carrot_rcc-0.8.3-py3-none-any.whl",
"yanked": false,
"yanked_reason": null
}
],
"upload_time": "2023-10-03 06:33:03",
"github": true,
"gitlab": false,
"bitbucket": false,
"codeberg": false,
"github_user": "datakurre",
"github_project": "carrot-rcc",
"travis_ci": false,
"coveralls": false,
"github_actions": false,
"lcname": "carrot-rcc"
}

