
# g2o Graph Optimization Lib for Ubuntu Linux
If you are on Ubuntu and/or its docker contianer,
```
pip install g2opy
```
is all you need to get started.
This g2opy module is built based on
1. https://github.com/uoip/g2opy
2. https://github.com/RainerKuemmerle/g2o
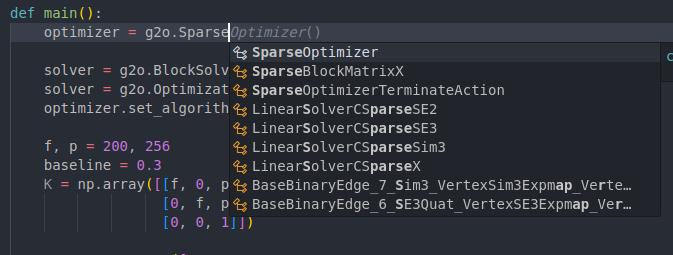
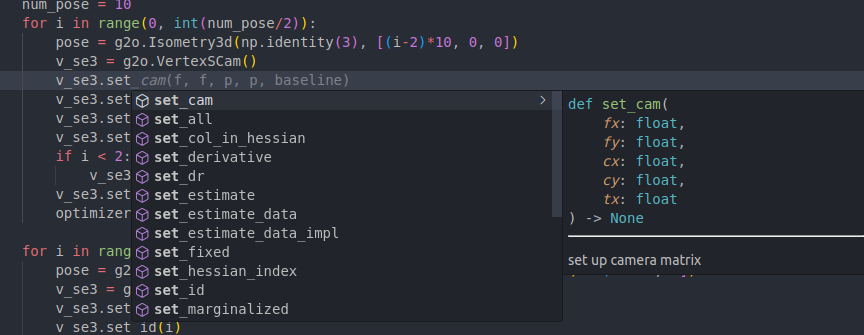
## Intellisense Enhanced
## License
MIT license. Currently, additional work is the build configuration on top of uoip/g2opy.
## Examples
To run the examples, install numpy if applicable.
```
pip install numpy
```
Bundle Adjustmend Example
```python
# https://github.com/RainerKuemmerle/g2o/blob/master/g2o/examples/sba/sba_demo.cpp
import numpy as np
import g2opy as g2o
np.set_printoptions(precision=3)
np.set_printoptions(suppress=True)
from collections import defaultdict
def showCameraPoses(optim, idx, N):
for i in range(idx, idx + N):
T = optim.vertex(i).estimate().matrix()
trans = T[:3, 3]
print('camera pose at ', i, ': ', trans)
def calcSSE(optim, idx, wPts):
sse = 0
N = wPts.shape[0]
for i in range(idx, idx + N):
guessedWpt = optim.vertex(i)
error = guessedWpt.estimate() - wPts[i-idx]
sse += np.sum(error ** 2)
return sse
def showWpts(optim, idx, N):
for i in range(idx, idx + N):
T = optim.vertex(i).estimate()
#T = np.round(T, 0)
print('guessed wPt at ', i-idx, ': ', T)
def main():
optimizer = g2o.SparseOptimizer()
solver = g2o.BlockSolverSE3(g2o.LinearSolverCSparseSE3())
solver = g2o.OptimizationAlgorithmLevenberg(solver)
optimizer.set_algorithm(solver)
f, p = 200, 256
baseline = 0.3
K = np.array([[f, 0, p],
[0, f, p],
[0, 0, 1]])
wPts = np.array([
[0, 0, 10],
[-1, 3, 30],
[2, 2, 37.2],
])
num_pose = 10
for i in range(0, int(num_pose/2)):
pose = g2o.Isometry3d(np.identity(3), [(i-2)*10, 0, 0])
v_se3 = g2o.VertexSCam()
v_se3.set_cam(f, f, p, p, baseline)
v_se3.set_id(i)
v_se3.set_estimate(pose)
if i < 2:
v_se3.set_fixed(True)
v_se3.set_all() # sets transfrom, projection, dR (angle)
optimizer.add_vertex(v_se3)
for i in range(int(num_pose/2), num_pose):
pose = g2o.Isometry3d(np.identity(3), [0, (i - int(num_pose/2)- 2) * 10, 0])
v_se3 = g2o.VertexSCam()
v_se3.set_cam(f, f, p, p, baseline)
v_se3.set_id(i)
v_se3.set_estimate(pose)
v_se3.set_fixed(False)
v_se3.set_all() # sets transfrom, projection, dR (angle)
optimizer.add_vertex(v_se3)
point_id = 0
for i, wpt in enumerate(wPts):
guessed_wPt = g2o.VertexSBAPointXYZ()
guessed_wPt.set_id(num_pose + point_id)
guessed_wPt.set_marginalized(True)
guessed_wPt.set_estimate(wpt + np.random.randn(3) )
optimizer.add_vertex(guessed_wPt)
for j in range(num_pose):
z = optimizer.vertex(j).map_point(wpt)
if i > 1:
z += np.random.randn(3)
edge = g2o.Edge_XYZ_VSC()
edge.set_vertex(0, guessed_wPt)
edge.set_vertex(1, optimizer.vertex(j))
edge.set_measurement(z)
edge.set_information(np.identity(3))
optimizer.add_edge(edge)
point_id += 1
sse0 = calcSSE(optimizer, num_pose, wPts)
print('\nRMSE (inliers only):')
print('before optimization:', np.sqrt(sse0 / wPts.shape[0]))
showCameraPoses(optimizer, 0, num_pose)
showWpts(optimizer, num_pose, 3)
print('Performing full BA:')
optimizer.initialize_optimization()
optimizer.set_verbose(False)
optimizer.optimize(100)
sse1 = calcSSE(optimizer, num_pose, wPts)
print('\nRMSE (inliers only):')
print('after optimization:', np.sqrt(sse1 / wPts.shape[0]))
showCameraPoses(optimizer, 0, num_pose)
showWpts(optimizer, num_pose, 3)
if __name__ == '__main__':
main()
```
Raw data
{
"_id": null,
"home_page": "https://github.com/ubicoders/g2opy",
"name": "g2opy",
"maintainer": null,
"docs_url": null,
"requires_python": "==3.9",
"maintainer_email": null,
"keywords": "g2o, SLAM, BA, ICP, optimization, python, binding",
"author": "ubicoders",
"author_email": "info@ubicoders.com",
"download_url": "https://files.pythonhosted.org/packages/c6/f2/078fdb5558944402181e683750fddb4d0c4e7b23cb4f1286131944ffb964/g2opy-0.0.9.tar.gz",
"platform": null,
"description": "\n\n\n# g2o Graph Optimization Lib for Ubuntu Linux\n\nIf you are on Ubuntu and/or its docker contianer,\n\n\n```\npip install g2opy\n```\n\nis all you need to get started.\n\n\nThis g2opy module is built based on\n1. https://github.com/uoip/g2opy\n2. https://github.com/RainerKuemmerle/g2o\n\n## Intellisense Enhanced\n\n\n\n\n\n\n\n\n## License\nMIT license. Currently, additional work is the build configuration on top of uoip/g2opy.\n\n## Examples\n\nTo run the examples, install numpy if applicable.\n\n```\npip install numpy\n```\n\nBundle Adjustmend Example\n\n```python\n# https://github.com/RainerKuemmerle/g2o/blob/master/g2o/examples/sba/sba_demo.cpp\n\nimport numpy as np\nimport g2opy as g2o\nnp.set_printoptions(precision=3)\nnp.set_printoptions(suppress=True)\nfrom collections import defaultdict\n\ndef showCameraPoses(optim, idx, N):\n for i in range(idx, idx + N):\n T = optim.vertex(i).estimate().matrix()\n trans = T[:3, 3]\n print('camera pose at ', i, ': ', trans)\n\ndef calcSSE(optim, idx, wPts):\n sse = 0\n N = wPts.shape[0]\n for i in range(idx, idx + N):\n guessedWpt = optim.vertex(i)\n error = guessedWpt.estimate() - wPts[i-idx]\n sse += np.sum(error ** 2)\n return sse\n\ndef showWpts(optim, idx, N):\n for i in range(idx, idx + N):\n T = optim.vertex(i).estimate()\n #T = np.round(T, 0)\n print('guessed wPt at ', i-idx, ': ', T)\n\ndef main():\n optimizer = g2o.SparseOptimizer()\n solver = g2o.BlockSolverSE3(g2o.LinearSolverCSparseSE3())\n solver = g2o.OptimizationAlgorithmLevenberg(solver)\n optimizer.set_algorithm(solver)\n\n f, p = 200, 256\n baseline = 0.3\n K = np.array([[f, 0, p],\n [0, f, p],\n [0, 0, 1]])\n\n wPts = np.array([\n [0, 0, 10],\n [-1, 3, 30],\n [2, 2, 37.2],\n ])\n\n num_pose = 10\n for i in range(0, int(num_pose/2)):\n pose = g2o.Isometry3d(np.identity(3), [(i-2)*10, 0, 0])\n v_se3 = g2o.VertexSCam()\n v_se3.set_cam(f, f, p, p, baseline)\n v_se3.set_id(i)\n v_se3.set_estimate(pose)\n if i < 2:\n v_se3.set_fixed(True)\n v_se3.set_all() # sets transfrom, projection, dR (angle)\n optimizer.add_vertex(v_se3)\n\n for i in range(int(num_pose/2), num_pose):\n pose = g2o.Isometry3d(np.identity(3), [0, (i - int(num_pose/2)- 2) * 10, 0])\n v_se3 = g2o.VertexSCam()\n v_se3.set_cam(f, f, p, p, baseline)\n v_se3.set_id(i)\n v_se3.set_estimate(pose)\n v_se3.set_fixed(False)\n v_se3.set_all() # sets transfrom, projection, dR (angle)\n optimizer.add_vertex(v_se3)\n\n point_id = 0\n\n for i, wpt in enumerate(wPts):\n guessed_wPt = g2o.VertexSBAPointXYZ()\n guessed_wPt.set_id(num_pose + point_id)\n guessed_wPt.set_marginalized(True)\n guessed_wPt.set_estimate(wpt + np.random.randn(3) )\n optimizer.add_vertex(guessed_wPt)\n\n for j in range(num_pose):\n z = optimizer.vertex(j).map_point(wpt)\n if i > 1:\n z += np.random.randn(3)\n edge = g2o.Edge_XYZ_VSC()\n edge.set_vertex(0, guessed_wPt)\n edge.set_vertex(1, optimizer.vertex(j))\n edge.set_measurement(z)\n edge.set_information(np.identity(3))\n optimizer.add_edge(edge)\n\n point_id += 1\n\n sse0 = calcSSE(optimizer, num_pose, wPts)\n print('\\nRMSE (inliers only):')\n print('before optimization:', np.sqrt(sse0 / wPts.shape[0]))\n showCameraPoses(optimizer, 0, num_pose)\n showWpts(optimizer, num_pose, 3)\n\n\n print('Performing full BA:')\n optimizer.initialize_optimization()\n optimizer.set_verbose(False)\n optimizer.optimize(100)\n\n sse1 = calcSSE(optimizer, num_pose, wPts)\n\n print('\\nRMSE (inliers only):')\n print('after optimization:', np.sqrt(sse1 / wPts.shape[0]))\n showCameraPoses(optimizer, 0, num_pose)\n showWpts(optimizer, num_pose, 3)\n\n\nif __name__ == '__main__':\n main()\n```\n\n\n\n\n\n",
"bugtrack_url": null,
"license": null,
"summary": "g2o for python",
"version": "0.0.9",
"project_urls": {
"Homepage": "https://github.com/ubicoders/g2opy"
},
"split_keywords": [
"g2o",
" slam",
" ba",
" icp",
" optimization",
" python",
" binding"
],
"urls": [
{
"comment_text": "",
"digests": {
"blake2b_256": "c6f2078fdb5558944402181e683750fddb4d0c4e7b23cb4f1286131944ffb964",
"md5": "3cdd9122fb5b62f58dcf334145d75ff0",
"sha256": "4e705bb12570e569f05c6a5dc1d1df08917bb2e074e2bbf888615ec8813456cd"
},
"downloads": -1,
"filename": "g2opy-0.0.9.tar.gz",
"has_sig": false,
"md5_digest": "3cdd9122fb5b62f58dcf334145d75ff0",
"packagetype": "sdist",
"python_version": "source",
"requires_python": "==3.9",
"size": 1417828,
"upload_time": "2024-05-12T04:40:03",
"upload_time_iso_8601": "2024-05-12T04:40:03.443464Z",
"url": "https://files.pythonhosted.org/packages/c6/f2/078fdb5558944402181e683750fddb4d0c4e7b23cb4f1286131944ffb964/g2opy-0.0.9.tar.gz",
"yanked": false,
"yanked_reason": null
}
],
"upload_time": "2024-05-12 04:40:03",
"github": true,
"gitlab": false,
"bitbucket": false,
"codeberg": false,
"github_user": "ubicoders",
"github_project": "g2opy",
"travis_ci": true,
"coveralls": false,
"github_actions": false,
"appveyor": true,
"lcname": "g2opy"
}


