<img src="https://raw.githubusercontent.com/dfki-ric/pytransform3d/main/doc/source/_static/logo.png" />
[](https://dl.circleci.com/status-badge/redirect/gh/dfki-ric/pytransform3d/tree/main)
[](https://codecov.io/gh/dfki-ric/pytransform3d)
[](https://doi.org/10.21105/joss.01159)
[](https://doi.org/10.5281/zenodo.2553450)
# pytransform3d
A Python library for transformations in three dimensions.
pytransform3d offers...
* operations like concatenation and inversion for most common representations
of rotation (orientation) and translation (position)
* conversions between those representations
* clear documentation of transformation conventions
* tight coupling with matplotlib to quickly visualize (or animate)
transformations
* the TransformManager which manages complex chains of transformations
(with export to graph visualization as PNG, additionally requires pydot)
* the TransformEditor which allows to modify transformations graphically
(additionally requires PyQt4/5)
* the UrdfTransformManager which is able to load transformations from
[URDF](https://wiki.ros.org/urdf) files (additionally requires lxml)
* a matplotlib-like interface to Open3D's visualizer to display and animate
geometries and transformations (additionally requires Open3D)
pytransform3d is used in various domains, for example:
* specifying motions of a robot
* learning robot movements from human demonstration
* sensor fusion for human pose estimation
* collision detection for robots
The API documentation can be found
[here](https://dfki-ric.github.io/pytransform3d/).
I gave a talk at EuroSciPy 2023 about pytransform3d. Slides are available
[here](https://github.com/AlexanderFabisch/pytransform3d_euroscipy2023/).
## Installation
Use pip to install the package from PyPI:
```bash
pip install 'pytransform3d[all]'
```
or conda:
```bash
conda install -c conda-forge pytransform3d
```
Take a look at the
[installation instructions](https://dfki-ric.github.io/pytransform3d/install.html)
in the documentation for more details.
## Gallery
The following plots and visualizations have been generated with pytransform3d.
The code for most examples can be found in
[the documentation](https://dfki-ric.github.io/pytransform3d/_auto_examples/index.html).
Left: [Nao robot](https://www.softbankrobotics.com/emea/en/nao) with URDF
from [Bullet3](https://github.com/bulletphysics/bullet3).
Right: [Kuka iiwa](https://www.kuka.com/en-de/products/robot-systems/industrial-robots/lbr-iiwa).
The animation is based on pytransform3d's visualization interface to
[Open3D](http://www.open3d.org/).
<img src="https://raw.githubusercontent.com/dfki-ric/pytransform3d/main/doc/source/_static/animation_nao.gif" height=200px/><img src="https://raw.githubusercontent.com/dfki-ric/pytransform3d/main/doc/source/_static/animation_kuka.gif" height=200px/><img src="https://raw.githubusercontent.com/dfki-ric/pytransform3d/main/doc/source/_static/animation_dynamics.gif" height=200px/>
Visualizations based on [Open3D](http://www.open3d.org/).
<img src="https://raw.githubusercontent.com/dfki-ric/pytransform3d/main/doc/source/_static/photogrammetry.png" height=200px/><img src="https://raw.githubusercontent.com/dfki-ric/pytransform3d/main/doc/source/_static/kuka_trajectories.png" height=200px/>
Various plots based on Matplotlib.
<img src="https://raw.githubusercontent.com/dfki-ric/pytransform3d/main/doc/source/_static/example_plot_box.png" width=200px/><img src="https://raw.githubusercontent.com/dfki-ric/pytransform3d/main/doc/source/_static/cylinders.png" width=200px/><img src="https://raw.githubusercontent.com/dfki-ric/pytransform3d/main/paper/plot_urdf.png" width=200px/><img src="https://raw.githubusercontent.com/dfki-ric/pytransform3d/main/doc/source/_static/transform_manager_mesh.png" width=200px/><img src="https://raw.githubusercontent.com/dfki-ric/pytransform3d/main/doc/source/_static/accelerate_cylinder.png" width=200px/><img src="https://raw.githubusercontent.com/dfki-ric/pytransform3d/main/doc/source/_static/example_plot_screw.png" width=200px/><img src="https://raw.githubusercontent.com/dfki-ric/pytransform3d/main/doc/source/_static/rotations_axis_angle.png" width=200px/><img src="https://raw.githubusercontent.com/dfki-ric/pytransform3d/main/doc/source/_static/concatenate_uncertain_transforms.png" width=200px/>
Transformation editor based on Qt.
<img src="https://raw.githubusercontent.com/dfki-ric/pytransform3d/main/paper/app_transformation_editor.png" height=300px/>
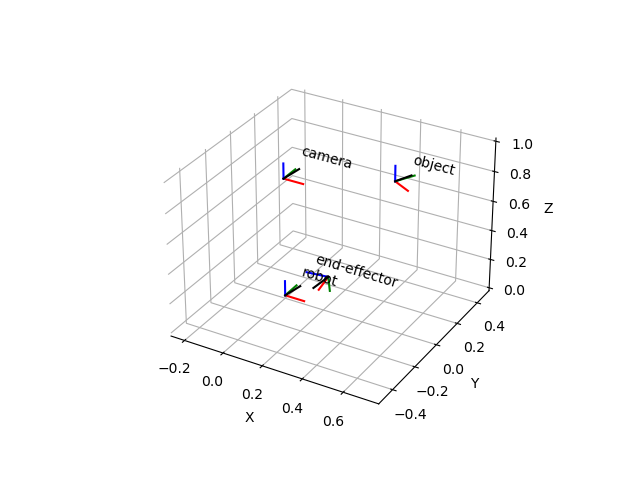
## Example
This is just one simple example. You can find more examples in the subfolder
`examples/`.
```python
import numpy as np
import matplotlib.pyplot as plt
from pytransform3d import rotations as pr
from pytransform3d import transformations as pt
from pytransform3d.transform_manager import TransformManager
rng = np.random.default_rng(0)
ee2robot = pt.transform_from_pq(
np.hstack((np.array([0.4, -0.3, 0.5]),
pr.random_quaternion(rng))))
cam2robot = pt.transform_from_pq(
np.hstack((np.array([0.0, 0.0, 0.8]), pr.q_id)))
object2cam = pt.transform_from(
pr.active_matrix_from_intrinsic_euler_xyz(np.array([0.0, 0.0, -0.5])),
np.array([0.5, 0.1, 0.1]))
tm = TransformManager()
tm.add_transform("end-effector", "robot", ee2robot)
tm.add_transform("camera", "robot", cam2robot)
tm.add_transform("object", "camera", object2cam)
ee2object = tm.get_transform("end-effector", "object")
ax = tm.plot_frames_in("robot", s=0.1)
ax.set_xlim((-0.25, 0.75))
ax.set_ylim((-0.5, 0.5))
ax.set_zlim((0.0, 1.0))
plt.show()
```
## Documentation
The API documentation can be found
[here](https://dfki-ric.github.io/pytransform3d/).
The documentation can be found in the directory `doc`.
To build the documentation, run e.g. (on linux):
```bash
cd doc
make html
```
The HTML documentation is now located at `doc/build/html/index.html`.
Execute the following command in the main folder of the repository
to install the dependencies:
```bash
pip install -e '.[doc]'
```
## Tests
You can use pytest to run the tests of this project in the root directory:
```bash
pytest
```
A coverage report will be located at `htmlcov/index.html`.
Note that you have to install `pytest` to run the tests and `pytest-cov` to
obtain the code coverage report.
## Contributing
If you wish to report bugs, please use the
[issue tracker](https://github.com/dfki-ric/pytransform3d/issues) at
Github. If you would like to contribute to pytransform3d, just open an issue
or a [pull request](https://github.com/dfki-ric/pytransform3d/pulls).
The target branch for pull requests is the develop branch.
The development branch will be merged to main for new releases.
If you have questions about the software, you should ask them in the
[discussion section](https://github.com/dfki-ric/pytransform3d/discussions).
The recommended workflow to add a new feature, add documentation, or fix a bug
is the following:
* Push your changes to a branch (e.g. `feature/x`, `doc/y`, or `fix/z`) of your
fork of the pytransform3d repository.
* Open a pull request to the latest development branch. There is usually an
open merge request from the latest development branch to the main branch.
* When the latest development branch is merged to the main branch, a new
release will be made.
Note that there is a
[checklist](https://github.com/dfki-ric/pytransform3d/wiki#checklist-for-new-features)
for new features.
It is forbidden to directly push to the main branch. Each new version
has its own development branch from which a pull request will be opened to the
main branch. Only the maintainer of the software is allowed to merge a
development branch to the main branch.
## License
The library is distributed under the
[3-Clause BSD license](https://github.com/dfki-ric/pytransform3d/blob/main/LICENSE).
## Citation
If you use pytransform3d for a scientific publication, I would appreciate
citation of the following paper:
Fabisch, A. (2019). pytransform3d: 3D Transformations for Python.
Journal of Open Source Software, 4(33), 1159,
[](https://doi.org/10.21105/joss.01159)
Bibtex entry:
```bibtex
@article{Fabisch2019,
doi = {10.21105/joss.01159},
url = {https://doi.org/10.21105/joss.01159},
year = {2019},
publisher = {The Open Journal},
volume = {4},
number = {33},
pages = {1159},
author = {Alexander Fabisch},
title = {pytransform3d: 3D Transformations for Python},
journal = {Journal of Open Source Software}
}
```
Raw data
{
"_id": null,
"home_page": "https://github.com/dfki-ric/pytransform3d",
"name": "pytransform3d",
"maintainer": null,
"docs_url": null,
"requires_python": null,
"maintainer_email": null,
"keywords": null,
"author": "Alexander Fabisch",
"author_email": "afabisch@googlemail.com",
"download_url": "https://files.pythonhosted.org/packages/81/04/0123601e32ccd9e9bd564ac584ac5afdecf0c4fba3610e8def3fb6d29e72/pytransform3d-3.13.0.tar.gz",
"platform": null,
"description": "<img src=\"https://raw.githubusercontent.com/dfki-ric/pytransform3d/main/doc/source/_static/logo.png\" />\n\n[](https://dl.circleci.com/status-badge/redirect/gh/dfki-ric/pytransform3d/tree/main)\n[](https://codecov.io/gh/dfki-ric/pytransform3d)\n[](https://doi.org/10.21105/joss.01159)\n[](https://doi.org/10.5281/zenodo.2553450)\n\n# pytransform3d\n\nA Python library for transformations in three dimensions.\n\npytransform3d offers...\n\n* operations like concatenation and inversion for most common representations\n of rotation (orientation) and translation (position)\n* conversions between those representations\n* clear documentation of transformation conventions\n* tight coupling with matplotlib to quickly visualize (or animate)\n transformations\n* the TransformManager which manages complex chains of transformations\n (with export to graph visualization as PNG, additionally requires pydot)\n* the TransformEditor which allows to modify transformations graphically\n (additionally requires PyQt4/5)\n* the UrdfTransformManager which is able to load transformations from\n [URDF](https://wiki.ros.org/urdf) files (additionally requires lxml)\n* a matplotlib-like interface to Open3D's visualizer to display and animate\n geometries and transformations (additionally requires Open3D)\n\npytransform3d is used in various domains, for example:\n\n* specifying motions of a robot\n* learning robot movements from human demonstration\n* sensor fusion for human pose estimation\n* collision detection for robots\n\nThe API documentation can be found\n[here](https://dfki-ric.github.io/pytransform3d/).\n\nI gave a talk at EuroSciPy 2023 about pytransform3d. Slides are available\n[here](https://github.com/AlexanderFabisch/pytransform3d_euroscipy2023/).\n\n## Installation\n\nUse pip to install the package from PyPI:\n\n```bash\npip install 'pytransform3d[all]'\n```\n\nor conda:\n\n```bash\nconda install -c conda-forge pytransform3d\n```\n\nTake a look at the\n[installation instructions](https://dfki-ric.github.io/pytransform3d/install.html)\nin the documentation for more details.\n\n## Gallery\n\nThe following plots and visualizations have been generated with pytransform3d.\nThe code for most examples can be found in\n[the documentation](https://dfki-ric.github.io/pytransform3d/_auto_examples/index.html).\n\nLeft: [Nao robot](https://www.softbankrobotics.com/emea/en/nao) with URDF\nfrom [Bullet3](https://github.com/bulletphysics/bullet3).\nRight: [Kuka iiwa](https://www.kuka.com/en-de/products/robot-systems/industrial-robots/lbr-iiwa).\nThe animation is based on pytransform3d's visualization interface to\n[Open3D](http://www.open3d.org/).\n\n<img src=\"https://raw.githubusercontent.com/dfki-ric/pytransform3d/main/doc/source/_static/animation_nao.gif\" height=200px/><img src=\"https://raw.githubusercontent.com/dfki-ric/pytransform3d/main/doc/source/_static/animation_kuka.gif\" height=200px/><img src=\"https://raw.githubusercontent.com/dfki-ric/pytransform3d/main/doc/source/_static/animation_dynamics.gif\" height=200px/>\n\nVisualizations based on [Open3D](http://www.open3d.org/).\n\n<img src=\"https://raw.githubusercontent.com/dfki-ric/pytransform3d/main/doc/source/_static/photogrammetry.png\" height=200px/><img src=\"https://raw.githubusercontent.com/dfki-ric/pytransform3d/main/doc/source/_static/kuka_trajectories.png\" height=200px/>\n\nVarious plots based on Matplotlib.\n\n<img src=\"https://raw.githubusercontent.com/dfki-ric/pytransform3d/main/doc/source/_static/example_plot_box.png\" width=200px/><img src=\"https://raw.githubusercontent.com/dfki-ric/pytransform3d/main/doc/source/_static/cylinders.png\" width=200px/><img src=\"https://raw.githubusercontent.com/dfki-ric/pytransform3d/main/paper/plot_urdf.png\" width=200px/><img src=\"https://raw.githubusercontent.com/dfki-ric/pytransform3d/main/doc/source/_static/transform_manager_mesh.png\" width=200px/><img src=\"https://raw.githubusercontent.com/dfki-ric/pytransform3d/main/doc/source/_static/accelerate_cylinder.png\" width=200px/><img src=\"https://raw.githubusercontent.com/dfki-ric/pytransform3d/main/doc/source/_static/example_plot_screw.png\" width=200px/><img src=\"https://raw.githubusercontent.com/dfki-ric/pytransform3d/main/doc/source/_static/rotations_axis_angle.png\" width=200px/><img src=\"https://raw.githubusercontent.com/dfki-ric/pytransform3d/main/doc/source/_static/concatenate_uncertain_transforms.png\" width=200px/>\n\nTransformation editor based on Qt.\n\n<img src=\"https://raw.githubusercontent.com/dfki-ric/pytransform3d/main/paper/app_transformation_editor.png\" height=300px/>\n\n## Example\n\nThis is just one simple example. You can find more examples in the subfolder\n`examples/`.\n\n```python\nimport numpy as np\nimport matplotlib.pyplot as plt\nfrom pytransform3d import rotations as pr\nfrom pytransform3d import transformations as pt\nfrom pytransform3d.transform_manager import TransformManager\n\n\nrng = np.random.default_rng(0)\n\nee2robot = pt.transform_from_pq(\n np.hstack((np.array([0.4, -0.3, 0.5]),\n pr.random_quaternion(rng))))\ncam2robot = pt.transform_from_pq(\n np.hstack((np.array([0.0, 0.0, 0.8]), pr.q_id)))\nobject2cam = pt.transform_from(\n pr.active_matrix_from_intrinsic_euler_xyz(np.array([0.0, 0.0, -0.5])),\n np.array([0.5, 0.1, 0.1]))\n\ntm = TransformManager()\ntm.add_transform(\"end-effector\", \"robot\", ee2robot)\ntm.add_transform(\"camera\", \"robot\", cam2robot)\ntm.add_transform(\"object\", \"camera\", object2cam)\n\nee2object = tm.get_transform(\"end-effector\", \"object\")\n\nax = tm.plot_frames_in(\"robot\", s=0.1)\nax.set_xlim((-0.25, 0.75))\nax.set_ylim((-0.5, 0.5))\nax.set_zlim((0.0, 1.0))\nplt.show()\n```\n\n\n\n## Documentation\n\nThe API documentation can be found\n[here](https://dfki-ric.github.io/pytransform3d/).\n\nThe documentation can be found in the directory `doc`.\nTo build the documentation, run e.g. (on linux):\n\n```bash\ncd doc\nmake html\n```\n\nThe HTML documentation is now located at `doc/build/html/index.html`.\nExecute the following command in the main folder of the repository\nto install the dependencies:\n\n```bash\npip install -e '.[doc]'\n```\n\n## Tests\n\nYou can use pytest to run the tests of this project in the root directory:\n\n```bash\npytest\n```\n\nA coverage report will be located at `htmlcov/index.html`.\nNote that you have to install `pytest` to run the tests and `pytest-cov` to\nobtain the code coverage report.\n\n## Contributing\n\nIf you wish to report bugs, please use the\n[issue tracker](https://github.com/dfki-ric/pytransform3d/issues) at\nGithub. If you would like to contribute to pytransform3d, just open an issue\nor a [pull request](https://github.com/dfki-ric/pytransform3d/pulls).\nThe target branch for pull requests is the develop branch.\nThe development branch will be merged to main for new releases.\nIf you have questions about the software, you should ask them in the\n[discussion section](https://github.com/dfki-ric/pytransform3d/discussions).\n\nThe recommended workflow to add a new feature, add documentation, or fix a bug\nis the following:\n\n* Push your changes to a branch (e.g. `feature/x`, `doc/y`, or `fix/z`) of your\n fork of the pytransform3d repository.\n* Open a pull request to the latest development branch. There is usually an\n open merge request from the latest development branch to the main branch.\n* When the latest development branch is merged to the main branch, a new\n release will be made.\n\nNote that there is a\n[checklist](https://github.com/dfki-ric/pytransform3d/wiki#checklist-for-new-features)\nfor new features.\n\nIt is forbidden to directly push to the main branch. Each new version\nhas its own development branch from which a pull request will be opened to the\nmain branch. Only the maintainer of the software is allowed to merge a\ndevelopment branch to the main branch.\n\n## License\n\nThe library is distributed under the\n[3-Clause BSD license](https://github.com/dfki-ric/pytransform3d/blob/main/LICENSE).\n\n## Citation\n\nIf you use pytransform3d for a scientific publication, I would appreciate\ncitation of the following paper:\n\nFabisch, A. (2019). pytransform3d: 3D Transformations for Python.\nJournal of Open Source Software, 4(33), 1159,\n[](https://doi.org/10.21105/joss.01159)\n\nBibtex entry:\n\n```bibtex\n@article{Fabisch2019,\n doi = {10.21105/joss.01159},\n url = {https://doi.org/10.21105/joss.01159},\n year = {2019},\n publisher = {The Open Journal},\n volume = {4},\n number = {33},\n pages = {1159},\n author = {Alexander Fabisch},\n title = {pytransform3d: 3D Transformations for Python},\n journal = {Journal of Open Source Software}\n}\n```\n",
"bugtrack_url": null,
"license": "BSD-3-Clause",
"summary": "3D transformations for Python",
"version": "3.13.0",
"project_urls": {
"Homepage": "https://github.com/dfki-ric/pytransform3d"
},
"split_keywords": [],
"urls": [
{
"comment_text": "",
"digests": {
"blake2b_256": "81040123601e32ccd9e9bd564ac584ac5afdecf0c4fba3610e8def3fb6d29e72",
"md5": "3d0d28ea763d5a10a0948ef546a6bd62",
"sha256": "97fd06d8e383f6a8507294d71dfbca9425ca9b894914997a9c2cfe8d415f6342"
},
"downloads": -1,
"filename": "pytransform3d-3.13.0.tar.gz",
"has_sig": false,
"md5_digest": "3d0d28ea763d5a10a0948ef546a6bd62",
"packagetype": "sdist",
"python_version": "source",
"requires_python": null,
"size": 8304892,
"upload_time": "2025-02-07T10:17:57",
"upload_time_iso_8601": "2025-02-07T10:17:57.561984Z",
"url": "https://files.pythonhosted.org/packages/81/04/0123601e32ccd9e9bd564ac584ac5afdecf0c4fba3610e8def3fb6d29e72/pytransform3d-3.13.0.tar.gz",
"yanked": false,
"yanked_reason": null
}
],
"upload_time": "2025-02-07 10:17:57",
"github": true,
"gitlab": false,
"bitbucket": false,
"codeberg": false,
"github_user": "dfki-ric",
"github_project": "pytransform3d",
"travis_ci": false,
"coveralls": true,
"github_actions": true,
"circle": true,
"requirements": [
{
"name": "numpy",
"specs": []
},
{
"name": "scipy",
"specs": []
},
{
"name": "matplotlib",
"specs": []
},
{
"name": "lxml",
"specs": []
},
{
"name": "trimesh",
"specs": []
},
{
"name": "pycollada",
"specs": []
},
{
"name": "pydot",
"specs": []
},
{
"name": "open3d",
"specs": []
}
],
"lcname": "pytransform3d"
}


