# <img src="https://raw.githubusercontent.com/neka-nat/kinpy/master/assets/logo.png" width="400" />
[](https://github.com/neka-nat/kinpy/actions/workflows/ubuntu.yml/badge.svg)
[](https://badge.fury.io/py/kinpy)
[](LICENSE)
[](https://pepy.tech/project/kinpy)
Simple kinematics body toolkit.
## Core features
* Pure python library.
* Support URDF, SDF and MJCF file.
* Calculate FK, IK and jacobian.

## Installation
```
pip install kinpy
```
## Getting started
Here is a program that reads urdf and generates a kinematic chain.
```py
import kinpy as kp
chain = kp.build_chain_from_urdf(open("kuka_iiwa/model.urdf").read())
print(chain)
# lbr_iiwa_link_0_frame
# └──── lbr_iiwa_link_1_frame
# └──── lbr_iiwa_link_2_frame
# └──── lbr_iiwa_link_3_frame
# └──── lbr_iiwa_link_4_frame
# └──── lbr_iiwa_link_5_frame
# └──── lbr_iiwa_link_6_frame
# └──── lbr_iiwa_link_7_frame
```
Displays the parameter names of joint angles included in the chain.
```py
print(chain.get_joint_parameter_names())
# ['lbr_iiwa_joint_1', 'lbr_iiwa_joint_2', 'lbr_iiwa_joint_3', 'lbr_iiwa_joint_4', 'lbr_iiwa_joint_5', 'lbr_iiwa_joint_6', 'lbr_iiwa_joint_7']
```
Given joint angle values, calculate forward kinematics.
```py
import math
th = {'lbr_iiwa_joint_2': math.pi / 4.0, 'lbr_iiwa_joint_4': math.pi / 2.0}
ret = chain.forward_kinematics(th)
# {'lbr_iiwa_link_0': Transform(rot=[1. 0. 0. 0.], pos=[0. 0. 0.]), 'lbr_iiwa_link_1': Transform(rot=[1. 0. 0. 0.], pos=[0. 0. 0.1575]), 'lbr_iiwa_link_2': Transform(rot=[-0.27059805 0.27059805 0.65328148 0.65328148], pos=[0. 0. 0.36]), 'lbr_iiwa_link_3': Transform(rot=[-9.23879533e-01 3.96044251e-14 -3.82683432e-01 -1.96942462e-12], pos=[ 1.44603337e-01 -6.78179735e-13 5.04603337e-01]), 'lbr_iiwa_link_4': Transform(rot=[-0.65328148 -0.65328148 0.27059805 -0.27059805], pos=[ 2.96984848e-01 -3.37579445e-13 6.56984848e-01]), 'lbr_iiwa_link_5': Transform(rot=[ 2.84114655e-12 3.82683432e-01 -1.87377891e-12 -9.23879533e-01], pos=[ 1.66523647e-01 -1.00338887e-12 7.87446049e-01]), 'lbr_iiwa_link_6': Transform(rot=[-0.27059805 0.27059805 -0.65328148 -0.65328148], pos=[ 1.41421356e-02 -7.25873884e-13 9.39827561e-01]), 'lbr_iiwa_link_7': Transform(rot=[ 9.23879533e-01 2.61060896e-12 -3.82683432e-01 4.81056861e-12], pos=[-4.31335137e-02 -1.01819561e-12 9.97103210e-01])}
```
You can get the position and orientation of each link.
If you want to use IK or Jacobian, you need to create a `SerialChain`.
When creating a `SerialChain`, an end effector must be specified.
```py
chain = kp.build_serial_chain_from_urdf(open("kuka_iiwa/model.urdf"), "lbr_iiwa_link_7")
th = [0.0, -math.pi / 4.0, 0.0, math.pi / 2.0, 0.0, math.pi / 4.0, 0.0]
ret = chain.forward_kinematics(th, end_only=True)
# chain.inverse_kinematics(ret)
# chain.jacobian(th)
```
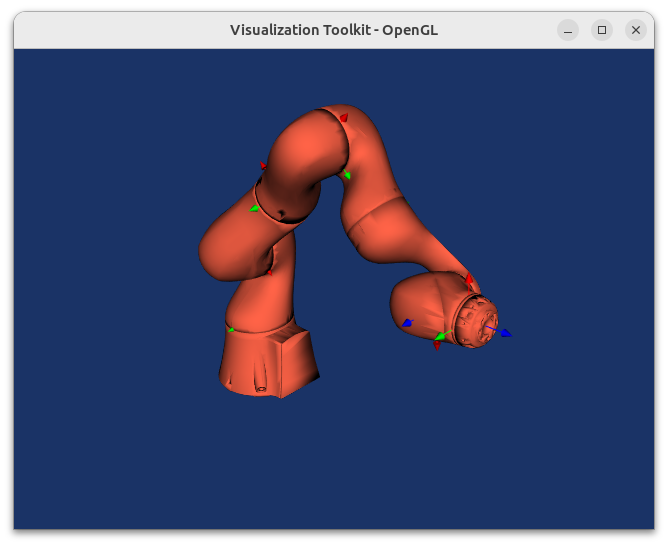
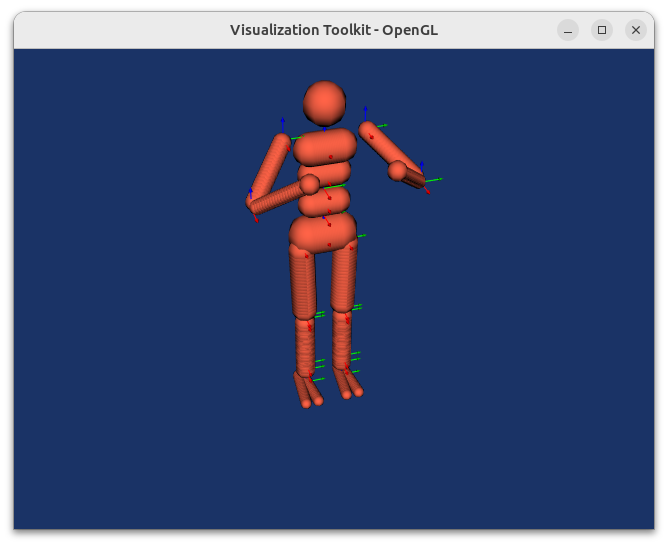
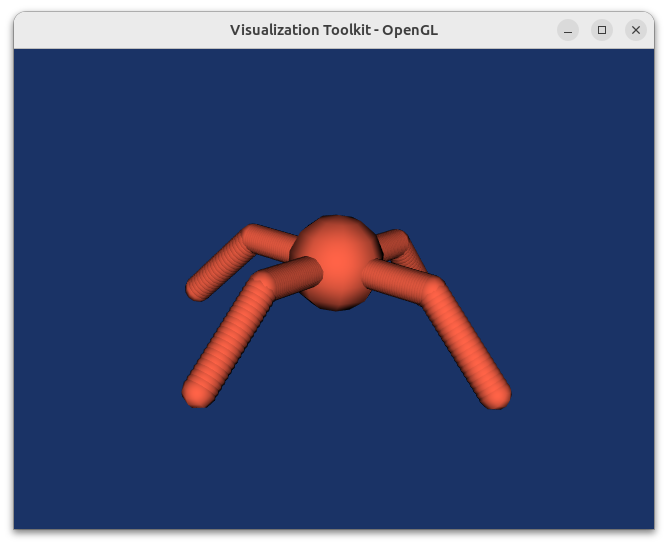
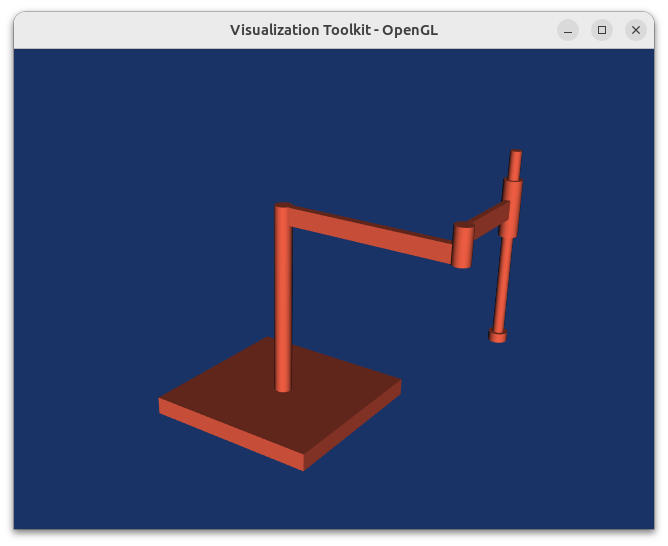
## Visualization
### KUKA IIWA
### Mujoco humanoid
### Mujoco ant
### Simple arm
## Citing
```
@software{kinpy,
author = {{Kenta-Tanaka et al.}},
title = {kinpy},
url = {https://github.com/neka-nat/kinpy},
version = {0.0.3},
date = {2019-10-11},
}
```
Raw data
{
"_id": null,
"home_page": "http://github.com/neka-nat/kinpy",
"name": "kinpy",
"maintainer": "",
"docs_url": null,
"requires_python": "",
"maintainer_email": "",
"keywords": "robot kinematics",
"author": "neka-nat",
"author_email": "nekanat.stock@gmail.com",
"download_url": "https://files.pythonhosted.org/packages/28/41/7249f6615e625659e6ad3e693a3ea046b0944900d7d25f2f429ce1245a2e/kinpy-0.4.2.tar.gz",
"platform": null,
"description": "# <img src=\"https://raw.githubusercontent.com/neka-nat/kinpy/master/assets/logo.png\" width=\"400\" />\n\n[](https://github.com/neka-nat/kinpy/actions/workflows/ubuntu.yml/badge.svg)\n[](https://badge.fury.io/py/kinpy)\n[](LICENSE)\n[](https://pepy.tech/project/kinpy)\n\nSimple kinematics body toolkit.\n\n## Core features\n\n* Pure python library.\n* Support URDF, SDF and MJCF file.\n* Calculate FK, IK and jacobian.\n\n\n\n## Installation\n\n```\npip install kinpy\n```\n\n## Getting started\nHere is a program that reads urdf and generates a kinematic chain.\n\n```py\nimport kinpy as kp\n\nchain = kp.build_chain_from_urdf(open(\"kuka_iiwa/model.urdf\").read())\nprint(chain)\n# lbr_iiwa_link_0_frame\n# \u2514\u2500\u2500\u2500\u2500 lbr_iiwa_link_1_frame\n# \u2514\u2500\u2500\u2500\u2500 lbr_iiwa_link_2_frame\n# \u2514\u2500\u2500\u2500\u2500 lbr_iiwa_link_3_frame\n# \u2514\u2500\u2500\u2500\u2500 lbr_iiwa_link_4_frame\n# \u2514\u2500\u2500\u2500\u2500 lbr_iiwa_link_5_frame\n# \u2514\u2500\u2500\u2500\u2500 lbr_iiwa_link_6_frame\n# \u2514\u2500\u2500\u2500\u2500 lbr_iiwa_link_7_frame\n```\n\nDisplays the parameter names of joint angles included in the chain.\n\n```py\nprint(chain.get_joint_parameter_names())\n# ['lbr_iiwa_joint_1', 'lbr_iiwa_joint_2', 'lbr_iiwa_joint_3', 'lbr_iiwa_joint_4', 'lbr_iiwa_joint_5', 'lbr_iiwa_joint_6', 'lbr_iiwa_joint_7']\n```\n\nGiven joint angle values, calculate forward kinematics.\n\n```py\nimport math\nth = {'lbr_iiwa_joint_2': math.pi / 4.0, 'lbr_iiwa_joint_4': math.pi / 2.0}\nret = chain.forward_kinematics(th)\n# {'lbr_iiwa_link_0': Transform(rot=[1. 0. 0. 0.], pos=[0. 0. 0.]), 'lbr_iiwa_link_1': Transform(rot=[1. 0. 0. 0.], pos=[0. 0. 0.1575]), 'lbr_iiwa_link_2': Transform(rot=[-0.27059805 0.27059805 0.65328148 0.65328148], pos=[0. 0. 0.36]), 'lbr_iiwa_link_3': Transform(rot=[-9.23879533e-01 3.96044251e-14 -3.82683432e-01 -1.96942462e-12], pos=[ 1.44603337e-01 -6.78179735e-13 5.04603337e-01]), 'lbr_iiwa_link_4': Transform(rot=[-0.65328148 -0.65328148 0.27059805 -0.27059805], pos=[ 2.96984848e-01 -3.37579445e-13 6.56984848e-01]), 'lbr_iiwa_link_5': Transform(rot=[ 2.84114655e-12 3.82683432e-01 -1.87377891e-12 -9.23879533e-01], pos=[ 1.66523647e-01 -1.00338887e-12 7.87446049e-01]), 'lbr_iiwa_link_6': Transform(rot=[-0.27059805 0.27059805 -0.65328148 -0.65328148], pos=[ 1.41421356e-02 -7.25873884e-13 9.39827561e-01]), 'lbr_iiwa_link_7': Transform(rot=[ 9.23879533e-01 2.61060896e-12 -3.82683432e-01 4.81056861e-12], pos=[-4.31335137e-02 -1.01819561e-12 9.97103210e-01])}\n```\n\nYou can get the position and orientation of each link.\n\nIf you want to use IK or Jacobian, you need to create a `SerialChain`.\nWhen creating a `SerialChain`, an end effector must be specified.\n\n```py\nchain = kp.build_serial_chain_from_urdf(open(\"kuka_iiwa/model.urdf\"), \"lbr_iiwa_link_7\")\nth = [0.0, -math.pi / 4.0, 0.0, math.pi / 2.0, 0.0, math.pi / 4.0, 0.0]\nret = chain.forward_kinematics(th, end_only=True)\n# chain.inverse_kinematics(ret)\n# chain.jacobian(th)\n```\n\n## Visualization\n\n### KUKA IIWA\n\n\n### Mujoco humanoid\n\n\n### Mujoco ant\n\n\n### Simple arm\n\n\n## Citing\n\n```\n@software{kinpy,\n author = {{Kenta-Tanaka et al.}},\n title = {kinpy},\n url = {https://github.com/neka-nat/kinpy},\n version = {0.0.3},\n date = {2019-10-11},\n}\n```\n",
"bugtrack_url": null,
"license": "MIT",
"summary": "Robotics kinematic calculation toolkit",
"version": "0.4.2",
"project_urls": {
"Homepage": "http://github.com/neka-nat/kinpy"
},
"split_keywords": [
"robot",
"kinematics"
],
"urls": [
{
"comment_text": "",
"digests": {
"blake2b_256": "28417249f6615e625659e6ad3e693a3ea046b0944900d7d25f2f429ce1245a2e",
"md5": "ae79b3ef6b0e2298a9f27b33aa4e33d8",
"sha256": "de9fc08acbd65372938d7754509512ad6f6cca4bb718f9aa423e249cdab35cc2"
},
"downloads": -1,
"filename": "kinpy-0.4.2.tar.gz",
"has_sig": false,
"md5_digest": "ae79b3ef6b0e2298a9f27b33aa4e33d8",
"packagetype": "sdist",
"python_version": "source",
"requires_python": null,
"size": 60621,
"upload_time": "2023-11-26T15:37:58",
"upload_time_iso_8601": "2023-11-26T15:37:58.057872Z",
"url": "https://files.pythonhosted.org/packages/28/41/7249f6615e625659e6ad3e693a3ea046b0944900d7d25f2f429ce1245a2e/kinpy-0.4.2.tar.gz",
"yanked": false,
"yanked_reason": null
}
],
"upload_time": "2023-11-26 15:37:58",
"github": true,
"gitlab": false,
"bitbucket": false,
"codeberg": false,
"github_user": "neka-nat",
"github_project": "kinpy",
"travis_ci": false,
"coveralls": false,
"github_actions": true,
"lcname": "kinpy"
}

