| Name | mink JSON |
| Version |
0.0.13
 JSON
JSON |
| download |
| home_page | None |
| Summary | mink: MuJoCo inverse kinematics. |
| upload_time | 2025-09-12 21:29:46 |
| maintainer | None |
| docs_url | None |
| author | None |
| requires_python | >=3.8 |
| license | None |
| keywords |
inverse
kinematics
mujoco
|
| VCS |
 |
| bugtrack_url |
|
| requirements |
No requirements were recorded.
|
| Travis-CI |
No Travis.
|
| coveralls test coverage |
No coveralls.
|
# mink
[](https://github.com/kevinzakka/mink/actions)
[](https://coveralls.io/github/kevinzakka/mink?branch=main)
[](https://pypi.org/project/mink/)
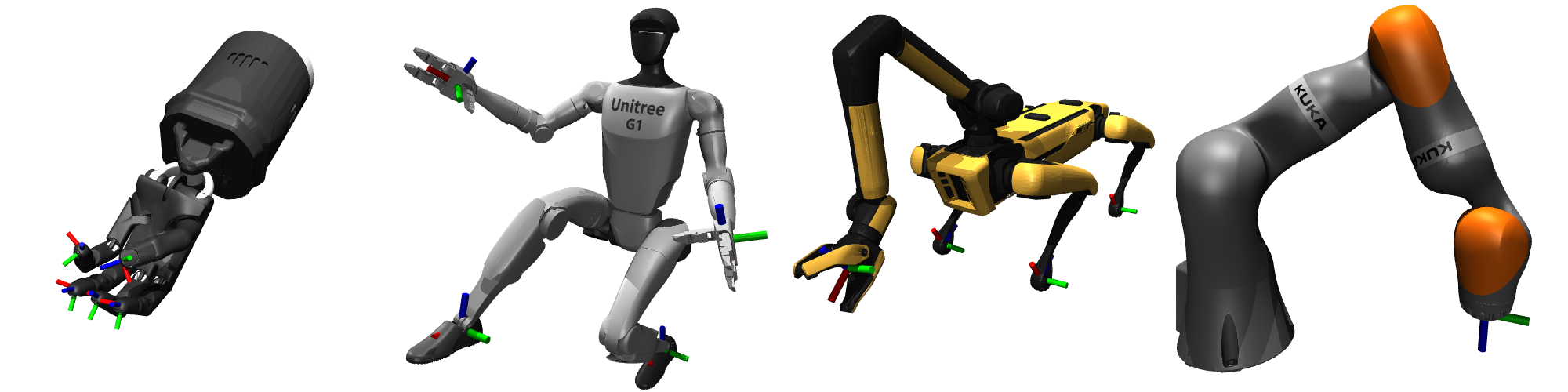
mink is a library for differential inverse kinematics in Python, based on the [MuJoCo](https://github.com/google-deepmind/mujoco) physics engine.
Features include:
* Task specification in configuration or operational space;
* Limits on joint positions and velocities;
* Collision avoidance between any geom pair;
* Support for closed-chain kinematics (loop closures) via [equality constraints](https://mujoco.readthedocs.io/en/stable/computation/index.html#coequality);
* Lie group interface for rigid body transformations.
For usage and API reference, see the [documentation](https://kevinzakka.github.io/mink/).
If you use mink in your research, please cite it as follows:
```bibtex
@software{Zakka_Mink_Python_inverse_2025,
author = {Zakka, Kevin},
title = {{Mink: Python inverse kinematics based on MuJoCo}},
year = {2025},
month = may,
version = {0.0.11},
url = {https://github.com/kevinzakka/mink},
license = {Apache-2.0}
}
```
## Installation
You can install `mink` using `pip`:
```bash
pip install mink
```
To include the example dependencies:
```bash
pip install "mink[examples]"
```
## Examples
mink works with a variety of robots, including:
* Arms: [UR5e](https://github.com/kevinzakka/mink/blob/main/examples/arm_ur5e_actuators.py), [iiwa14](https://github.com/kevinzakka/mink/blob/main/examples/arm_iiwa.py), [bimanual iiwa14](https://github.com/kevinzakka/mink/blob/main/examples/dual_iiwa.py)
* Humanoids: [Unitree G1](https://github.com/kevinzakka/mink/blob/main/examples/humanoid_g1.py), [Unitree H1](https://github.com/kevinzakka/mink/blob/main/examples/humanoid_h1.py)
* Quadrupeds: [Unitree Go1](https://github.com/kevinzakka/mink/blob/main/examples/quadruped_go1.py), [Boston Dynamics Spot](https://github.com/kevinzakka/mink/blob/main/examples/quadruped_spot.py)
* Hands: [Shadow Hand](https://github.com/kevinzakka/mink/blob/main/examples/hand_shadow.py), [Allegro Hand](https://github.com/kevinzakka/mink/blob/main/examples/arm_hand_iiwa_allegro.py)
* Mobile manipulators: [Stanford TidyBot](https://github.com/kevinzakka/mink/blob/main/examples/mobile_tidybot.py), [Hello Robot Stretch](https://github.com/kevinzakka/mink/blob/main/examples/mobile_stretch.py)
Check out the [examples](https://github.com/kevinzakka/mink/blob/main/examples/) directory for more code.
## How can I help?
Install the library, use it and report any bugs in the [issue tracker](https://github.com/kevinzakka/mink/issues) if you find any. If you're feeling adventurous, you can also check out the contributing [guidelines](CONTRIBUTING.md) and submit a pull request.
## Acknowledgements
mink is a direct port of [Pink](https://github.com/stephane-caron/pink) which uses [Pinocchio](https://github.com/stack-of-tasks/pinocchio) under the hood. Stéphane Caron, the author of Pink, is a role model for open-source software in robotics. This library would not have been possible without his work and assistance throughout this project.
mink also heavily adapts code from the following libraries:
* The lie algebra library that powers the transforms in mink is adapted from [jaxlie](https://github.com/brentyi/jaxlie).
* The collision avoidance constraint is adapted from [dm_robotics](https://github.com/google-deepmind/dm_robotics/tree/main/cpp/controllers)'s LSQP controller.
Raw data
{
"_id": null,
"home_page": null,
"name": "mink",
"maintainer": null,
"docs_url": null,
"requires_python": ">=3.8",
"maintainer_email": null,
"keywords": "inverse, kinematics, mujoco",
"author": null,
"author_email": "Kevin Zakka <zakka@berkeley.edu>",
"download_url": "https://files.pythonhosted.org/packages/9d/a3/dcb9ba6099894bd5ae50a3edce4b5b5bdac42a648b919cd06a177f58b0d8/mink-0.0.13.tar.gz",
"platform": null,
"description": "# mink\n\n[](https://github.com/kevinzakka/mink/actions)\n[](https://coveralls.io/github/kevinzakka/mink?branch=main)\n[](https://pypi.org/project/mink/)\n\n\nmink is a library for differential inverse kinematics in Python, based on the [MuJoCo](https://github.com/google-deepmind/mujoco) physics engine.\n\nFeatures include:\n\n* Task specification in configuration or operational space;\n* Limits on joint positions and velocities;\n* Collision avoidance between any geom pair;\n* Support for closed-chain kinematics (loop closures) via [equality constraints](https://mujoco.readthedocs.io/en/stable/computation/index.html#coequality);\n* Lie group interface for rigid body transformations.\n\nFor usage and API reference, see the [documentation](https://kevinzakka.github.io/mink/).\n\nIf you use mink in your research, please cite it as follows:\n\n```bibtex\n@software{Zakka_Mink_Python_inverse_2025,\n author = {Zakka, Kevin},\n title = {{Mink: Python inverse kinematics based on MuJoCo}},\n year = {2025},\n month = may,\n version = {0.0.11},\n url = {https://github.com/kevinzakka/mink},\n license = {Apache-2.0}\n}\n```\n\n## Installation\n\nYou can install `mink` using `pip`:\n\n```bash\npip install mink\n```\n\nTo include the example dependencies:\n\n```bash\npip install \"mink[examples]\"\n```\n\n## Examples\n\nmink works with a variety of robots, including:\n\n* Arms: [UR5e](https://github.com/kevinzakka/mink/blob/main/examples/arm_ur5e_actuators.py), [iiwa14](https://github.com/kevinzakka/mink/blob/main/examples/arm_iiwa.py), [bimanual iiwa14](https://github.com/kevinzakka/mink/blob/main/examples/dual_iiwa.py)\n* Humanoids: [Unitree G1](https://github.com/kevinzakka/mink/blob/main/examples/humanoid_g1.py), [Unitree H1](https://github.com/kevinzakka/mink/blob/main/examples/humanoid_h1.py)\n* Quadrupeds: [Unitree Go1](https://github.com/kevinzakka/mink/blob/main/examples/quadruped_go1.py), [Boston Dynamics Spot](https://github.com/kevinzakka/mink/blob/main/examples/quadruped_spot.py)\n* Hands: [Shadow Hand](https://github.com/kevinzakka/mink/blob/main/examples/hand_shadow.py), [Allegro Hand](https://github.com/kevinzakka/mink/blob/main/examples/arm_hand_iiwa_allegro.py)\n* Mobile manipulators: [Stanford TidyBot](https://github.com/kevinzakka/mink/blob/main/examples/mobile_tidybot.py), [Hello Robot Stretch](https://github.com/kevinzakka/mink/blob/main/examples/mobile_stretch.py)\n\nCheck out the [examples](https://github.com/kevinzakka/mink/blob/main/examples/) directory for more code.\n\n## How can I help?\n\nInstall the library, use it and report any bugs in the [issue tracker](https://github.com/kevinzakka/mink/issues) if you find any. If you're feeling adventurous, you can also check out the contributing [guidelines](CONTRIBUTING.md) and submit a pull request.\n\n## Acknowledgements\n\nmink is a direct port of [Pink](https://github.com/stephane-caron/pink) which uses [Pinocchio](https://github.com/stack-of-tasks/pinocchio) under the hood. St\u00e9phane Caron, the author of Pink, is a role model for open-source software in robotics. This library would not have been possible without his work and assistance throughout this project.\n\nmink also heavily adapts code from the following libraries:\n\n* The lie algebra library that powers the transforms in mink is adapted from [jaxlie](https://github.com/brentyi/jaxlie).\n* The collision avoidance constraint is adapted from [dm_robotics](https://github.com/google-deepmind/dm_robotics/tree/main/cpp/controllers)'s LSQP controller.\n\n",
"bugtrack_url": null,
"license": null,
"summary": "mink: MuJoCo inverse kinematics.",
"version": "0.0.13",
"project_urls": {
"Changelog": "https://github.com/kevinzakka/mink/blob/main/CHANGELOG.md",
"Documentation": "https://kevinzakka.github.io/mink/",
"Homepage": "https://kevinzakka.github.io/mink/",
"Source": "https://github.com/kevinzakka/mink",
"Tracker": "https://github.com/kevinzakka/mink/issues"
},
"split_keywords": [
"inverse",
" kinematics",
" mujoco"
],
"urls": [
{
"comment_text": null,
"digests": {
"blake2b_256": "663e3340943f4c614c584efd56ea2ac42cf5358f469a81b424e4acf4fccaa33e",
"md5": "1c1af08c4936f76a19af9d4be7f6a473",
"sha256": "07b9e780f79937b082de01a0fea64b33aa43160ad088217998a212fc0bfb1173"
},
"downloads": -1,
"filename": "mink-0.0.13-py3-none-any.whl",
"has_sig": false,
"md5_digest": "1c1af08c4936f76a19af9d4be7f6a473",
"packagetype": "bdist_wheel",
"python_version": "py3",
"requires_python": ">=3.8",
"size": 914736,
"upload_time": "2025-09-12T21:29:42",
"upload_time_iso_8601": "2025-09-12T21:29:42.051186Z",
"url": "https://files.pythonhosted.org/packages/66/3e/3340943f4c614c584efd56ea2ac42cf5358f469a81b424e4acf4fccaa33e/mink-0.0.13-py3-none-any.whl",
"yanked": false,
"yanked_reason": null
},
{
"comment_text": null,
"digests": {
"blake2b_256": "9da3dcb9ba6099894bd5ae50a3edce4b5b5bdac42a648b919cd06a177f58b0d8",
"md5": "518d69a7a79a8792a96f96b8d12ec200",
"sha256": "481f6187dc3fd320e2c0b6e8393d79c52bc70272835d641ecdf6e5fdf0e6b835"
},
"downloads": -1,
"filename": "mink-0.0.13.tar.gz",
"has_sig": false,
"md5_digest": "518d69a7a79a8792a96f96b8d12ec200",
"packagetype": "sdist",
"python_version": "source",
"requires_python": ">=3.8",
"size": 693562,
"upload_time": "2025-09-12T21:29:46",
"upload_time_iso_8601": "2025-09-12T21:29:46.821671Z",
"url": "https://files.pythonhosted.org/packages/9d/a3/dcb9ba6099894bd5ae50a3edce4b5b5bdac42a648b919cd06a177f58b0d8/mink-0.0.13.tar.gz",
"yanked": false,
"yanked_reason": null
}
],
"upload_time": "2025-09-12 21:29:46",
"github": true,
"gitlab": false,
"bitbucket": false,
"codeberg": false,
"github_user": "kevinzakka",
"github_project": "mink",
"travis_ci": false,
"coveralls": false,
"github_actions": true,
"lcname": "mink"
}
